トップダウン評価を行う際は、動作観察・分析が重要であり、
今回は動作課題(task)についてまとめたいと思う。
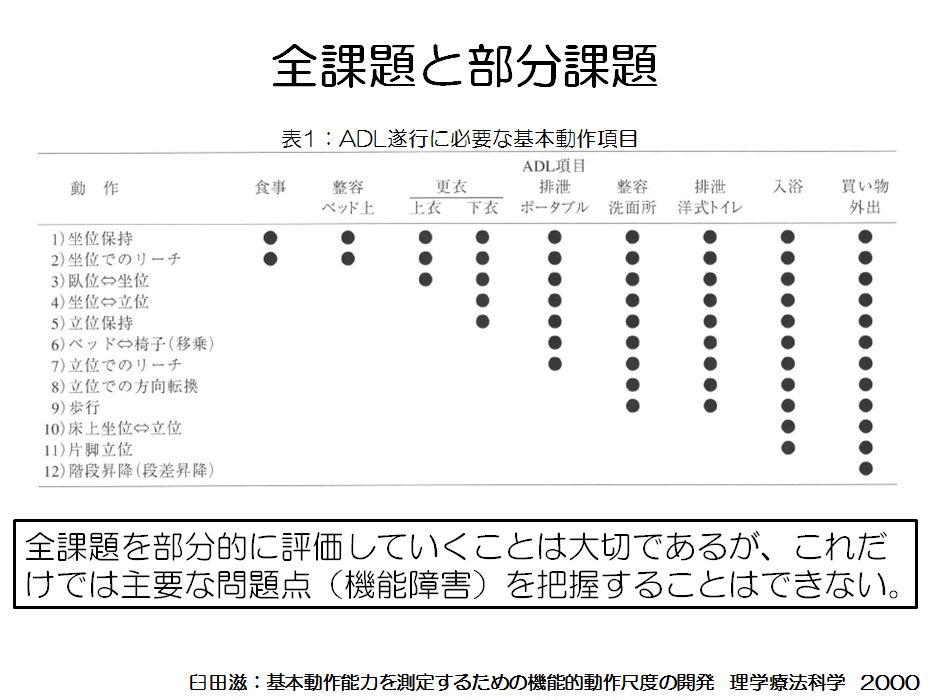
動作課題にはwhole task(全課題)とpart task(部分課題)がある。私たちが動作分析・課題を行う際、
例えば、whole taskがトイレ動作だとする。そのpart taskが移乗動作であり、移乗動作に問題があるとする。
歩行のcomponentを考えてみる。
歩行(足を一歩前に出す)を行うためには、立脚側の足関節外反・股関節内転に伴い骨盤が立脚側へ偏位し、重心が立脚側足底へ移動する。体幹・頸部は立ち直りが起こり伸展位をキープする。また、立脚側足関節背屈曲・股関節内旋により、重心は前方へ移動。これにより、遊脚側骨盤の前方回旋が起こり、遊脚が可能となる。遊脚時、clearanceを確保するために骨盤は水平位に保持する。このように1歩出すためには、多くの関節アライメントの変化が起こり、それを可能にするためには様々な筋群の活動が必要となる。
また、神経メカニズムでは、まず①皮質橋網様体脊髄システムが働き、抗重力伸展位を保ちながら重心を支持脚へ移し、動作の正しい方向付けを行う。②重心の変化は、前庭脊髄システムを働かせ支持脚の抗重力伸展活動を強める。③皮質橋網様体脊髄システムおよび前庭脊髄システムにより、一側下肢で姿勢をコントロールすることが可能となったら、皮質延髄網様体脊髄システムにより遊脚肢は支持をすることをやめ、空間で円滑に姿勢筋緊張をコントロールできるよう調整することにより1歩前に出すことが可能となる。詳しくはこちら
このように1つの課題を行うためには、多くのcomponentが必要である。



そのため、part taskとはwhole taskの一部を抜き出した動作ではなく、whole taskを行うために必要なcomponentを2つ以上含んだ課題と理解すべきである。
例えば、座位でのバランス能力を見ると歩行に必要な体幹の機能を評価することも可能であるし、起立や着座動作では、Feedback系やFeedforward系の評価が可能である。
詳しくはこちら
part taskをいくつか組わせて評価・分析を行うことで、主要な問題点を把握することができ、どういう姿勢・課題でどこから治療を行えばよいか把握するという、クリニカルリーズニングを行うことができる。
本日はここまで。
続きはまた次回。。。
書籍の紹介















































{kind=link}